
Robotergreifsysteme – entscheidend für Prozesssicherheit und Effizienz
Was auf den ersten Blick wie ein einfaches Greifwerkzeug wirkt, ist in Wirklichkeit ein hochkomplexes System. Robotergreifsysteme bestehen nicht nur aus dem eigentlichen Greifer, sondern aus einer Vielzahl aufeinander abgestimmter Komponenten.
Ihre Auslegung hat maßgeblichen Einfluss auf Prozesssicherheit, Taktzeit, Flexibilität und die spätere Erweiterbarkeit einer Automationslösung.
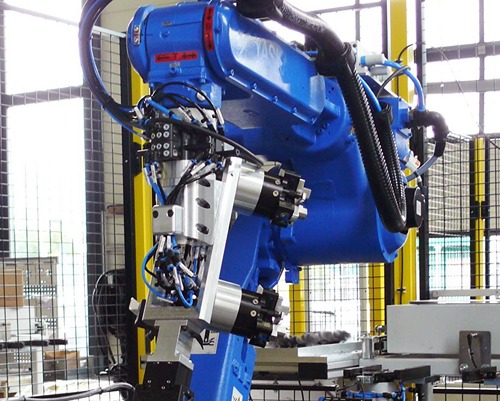
Zum Greifsystem gehören neben dem Greifmodul selbst auch Antriebe, Sensorik, Medienversorgung sowie werkstückspezifische Formteile wie Greiferbacken oder Vakuumaufnahmen. Bereits kleine konstruktive Details können darüber entscheiden, ob ein Bauteil sicher gegriffen, positioniert und wieder abgelegt wird.
Häufig kommen Mehrfachgreifer zum Einsatz, um Nebenzeiten zu reduzieren oder unterschiedliche Werkstückzustände abzubilden. Gleichzeitig steigen damit Anforderungen an Traglast, Zugänglichkeit und Auslegung des Roboters.
Der Beitrag zeigt außerdem, welche Rolle Greiferwechselkonzepte spielen – von einfachen manuellen Lösungen bis hin zu automatischen Greiferwechselsystemen für hochflexible Fertigungsprozesse.